近日,第五届焉知汽车年会暨第四届知鼎奖颁奖典礼于上海举办。挚途科技凭借领先的产品技术优势和亮眼的市场资本表现,蝉联知鼎奖年度最具价值投资大奖。

在智能驾驶论坛上,挚途科技应邀以智电一体化下的无人环卫产品为例,介绍了低速L4级自动驾驶技术产品实践。

挚途科技主要业务围绕高速场景和低速场景双线布局,其中低速场景基于智能驾驶与车路云一体化技术,开创专用场景智能化的技术和运营新模式。
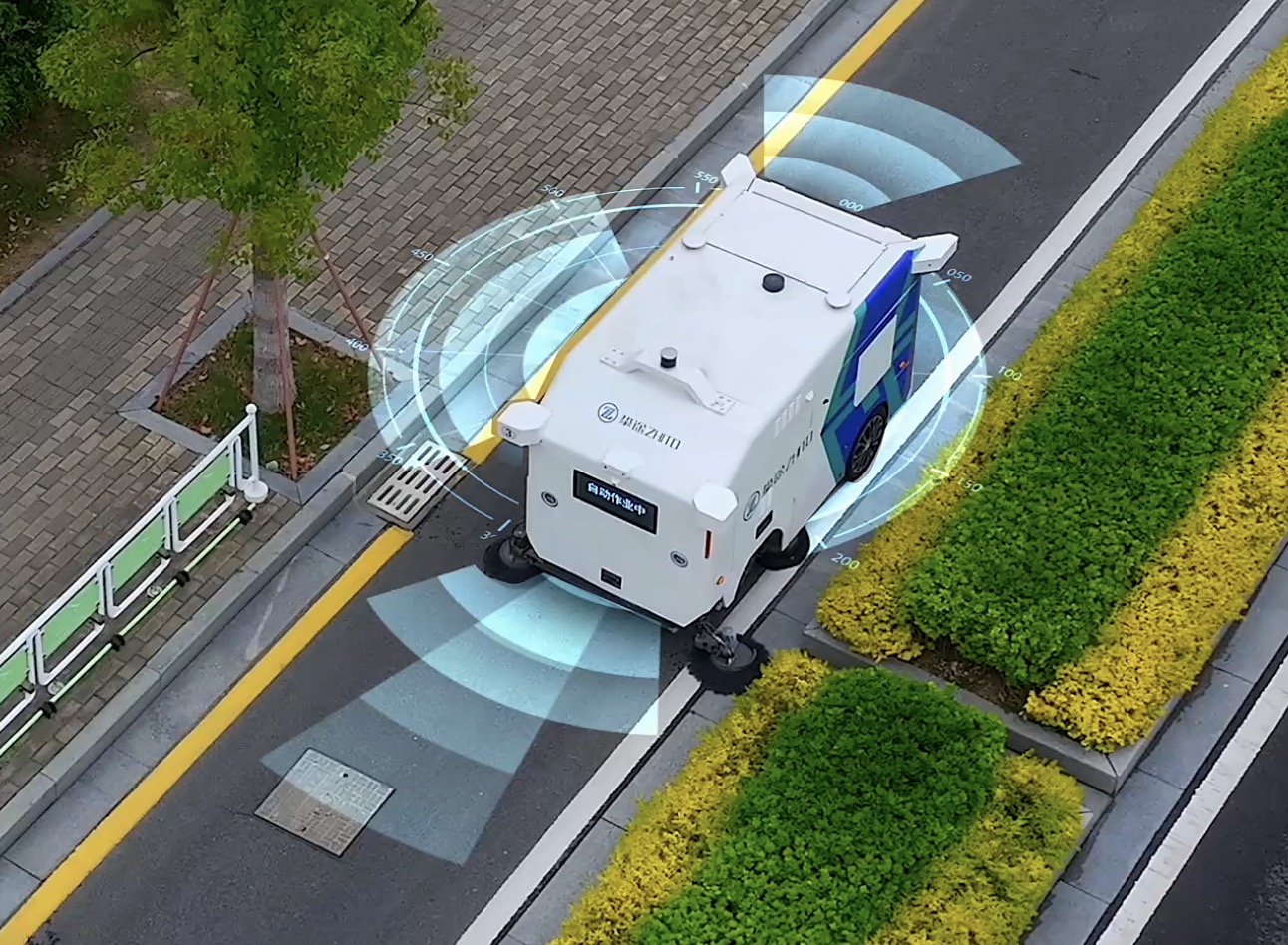
在环卫场景中,挚途打造了覆盖大中小型全平台的智慧环卫产品矩阵,提供无人环卫一站式解决方案,是行业首个可提供大型无人环卫产品的服务商,其中L4无人扫路机可在公园、广场、人行辅道、景区等多场景实现全域化运行,环卫场景形成多产品智能协同,常态化作业能力实现了规模化部署。

通过持续的技术打磨,在挚途鹰腾系统的赋能下,挚途新一代智能环卫作业系统已进入3.0,综合考虑交通路况、垃圾分布、优先级等因素,可实现全天候、全场景、高安全、高效率的清洁服务。车辆具备自动转场(含进出地下停车场和道闸)、自动贴边作业、自动泊车、自动避障/绕障、路口红绿灯/人行灯识别通过、自动采图、远程驾驶、手机/平板APP操控、OTA升级、V2X、运营调度、故障监控、数据分析等功能。
在硬件方面,挚途自研车规级自动驾驶核心硬件,实现了硬件系统的自主可控,有力打破了国外技术垄断的局面。硬件历经严苛的环境与可靠性测试,能够在 - 30℃至 + 55℃的温度区间内长时间稳定运行。在算力方面提供了500TOPS的支持,并借助量化、稀疏、蒸馏等模型轻量技术,确保模型运行高性能且低延迟。
在感知任务上,车辆基于激光雷达、摄像头、毫米波雷达多种异构传感器的有效融合,克服了单一传感器的缺陷,全方位筑牢安全防线。通过BEV、语义分割和OCC技术,实时识别行人、车辆及异形障碍物,有效分辨灰尘、雨雾等噪声,精准识别低至10cm的小障碍物,实现全场景无死角障碍物感知,减少碰撞风险。
在地图定位任务上,基于先进的多传感器融合SLAM算法,挚途自研高精度地图定位算法,结合业界领先的感知信息,可有效应对楼宇遮挡、隧道、地库等复杂场景,实现全场景全路段厘米级高精度定位覆盖,定位精度小于5cm,建图效率超过10km/1人天。
在行为决策与规划控制任务上,挚途针对低速场景开发了狭窄空间绕障和路口多障碍物交互博弈算法,显著提升了低速场景的通行能力。通过分布式仿真集群,算法迭代效率大幅提升,显著降低实车测试的成本,车辆控制精度小于5cm。

此外,挚途科技无人环卫智慧运营解决方案深度融合数字孪生平台、环卫运营业务、自动驾驶车辆、远程调度、APP等模块,升级运营平台功能,提供智慧高效的运营服务。无人环卫项目运营里程已累计超过100万公里,0安全事故,是首个实现环卫车路协同的企业。商业服务模式灵活,可支持车辆销售、租赁和运营等多种方式。
凭借着行业领先的产品、技术、运营优势,目前挚途无人环卫项目已在华东、西南、东北等区域规模化落地,后续将扩展至全国各地区。未来,挚途科技将继续坚持用户价值为先,产品为王,助力绿色零碳的智慧城市发展。

©苏州挚途科技有限公司 2020版权所有
苏ICP备案号:苏ICP备20011323号-1
技术支持: